Yandong Luo

MSCS & Robotics Student, Georgia Institute of Technology
About me
Hi! This is Yandong Luo, a master student in Computer Science & Robotics at Georgia Institute of Technology, where I’m advised by Prof. Zhao Ye and Prof. Lu Gan. I’m broadly interested in Perception and Planning. My current research focuses on CUDA-based planning and control and Multimodal sensor fusion.
Before coming to GaTech, I was working at Tusimple company for L2 and L4 trajectory planning and decision making of autonomous trucks operating in the bustling port of Shanghai, China. I obtained my master’s degree at the University of Illinois at Urbana Champaign, where I conducted research on perception and planning for autonomous vehicles under the supervision of Prof. Bob Norris. I completed my bachelor’s degree in Mechanical Engieering at Dongguan University of Technology, where I was advised by Prof. Jianwen Guo. During my undergraduate period, I worked on multi-agent systems.
Working Experience
Tusimple Algorithm Engineer – Path Planning & Decision Making
L2 Lateral Trajectory Optimization
L4 Game Theory for Lane Change
Research Interest
- Autonomous Driving
- Robot Perception
- Robot Learning
Selected Papers (*indicates equal technical contribution)
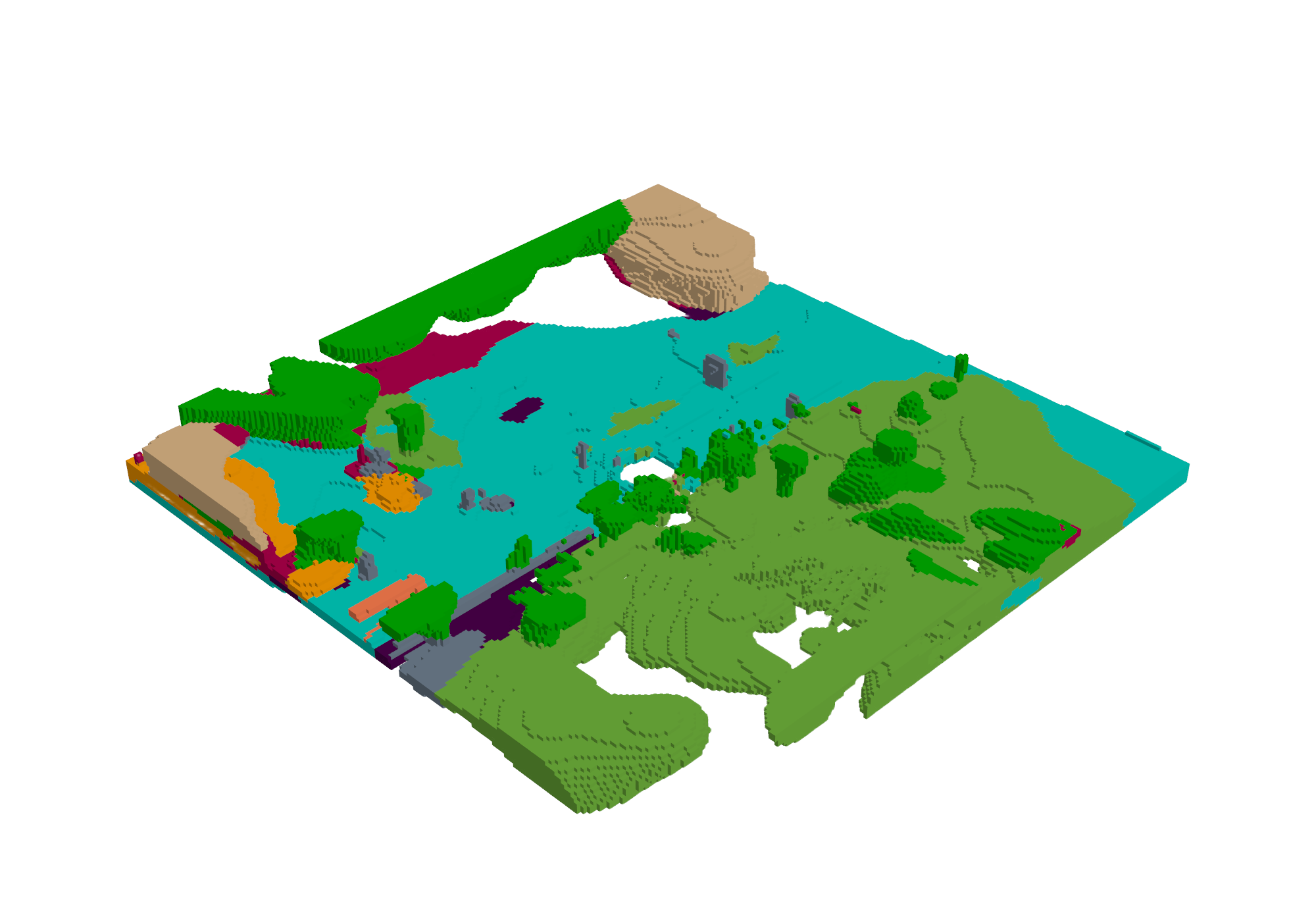
ShelfGaussian: Shelf-Supervised Open-Vocabulary Multi-Modal Gaussian 3D Scene Understanding
Lingjun Zhao*, Yandong Luo*, James Hays, Lu Gan
Summary
We introduce ShelfGaussian, an open-vocabulary multi-modal Gaussian-based 3D scene understanding framework supervised by off-the-shelf vision foundation models (VFMs). Gaussian-based methods have demonstrated superior performance and computational efficiency across a wide range of scene understanding tasks. However, existing methods either model objects as closed-set semantic Gaussians supervised by annotated 3D labels, neglecting their rendering ability, or learn open-set Gaussian representations via purely 2D self-supervision, leading to degraded geometry and limited to camera-only settings. To fully exploit the potential of Gaussians, we propose a Multi-Modal Gaussian Transformer that enables Gaussians to query features from diverse sensor modalities, and a Shelf-Supervised Learning Paradigm that efficiently optimizes Gaussians with VFM features jointly at 2D image and 3D scene levels. We evaluate ShelfGaussian on various perception and planning tasks. Experiments on Occ3D-nuScenes demonstrate its state-of-the-art zero-shot semantic occupancy prediction performance. ShelfGaussian is further evaluated on an unmanned ground vehicle (UGV) to assess its in-the-wild performance across diverse urban scenarios.

Towards Tighter Convex Relaxation of Mixed-integer Programs: Leveraging Logic Network Flow for Task and Motion Planning
Xuan Lin, Jiming Ren*, Yandong Luo*, Weijun Xie, and Ye Zhao
Submitted to the International Journal of Robotics Research (IJRR), 2025
Summary
This paper proposes an optimization-based task and motion planning framework, named “Logic Network Flow,” that integrates temporal logic specifications into mixed-integer programs for efficient robot planning. Inspired by the Graphof-Convex-Sets formulation, temporal predicates are encoded as polyhedron constraints on each edge of a network flow model, instead of as constraints between nodes in traditional Logic Tree formulations. We further propose a network-flow-based Fourier-Motzkin elimination procedure that removes continuous flow variables while preserving convex relaxation tightness, leading to provably tighter convex relaxations and fewer constraints than Logic Tree formulations. For temporal logic motion planning with piecewise-affine dynamic systems, comprehensive experiments across vehicle routing, multi-robot coordination, and temporal logic control on dynamical systems using point mass and linear inverted pendulum models demonstrate computational speedups of up to several orders of magnitude. Hardware demonstrations with quadrupedal robots validate real-time replanning capabilities under dynamically changing environmental conditions.

Fault diagnosis of industrial robot reducer by an extreme learning machine with a level-based learning swarm optimizer
Jianwen Guo, Xiaoyan Li, Zhenpeng Lao, Yandong Luo, Jiapeng Wu, and Shaohui Zhang
Journal of Advances in Mechanical Engineering, 2021
Summary
Fault diagnosis is of great significance to improve the production efficiency and accuracy of industrial robots. Compared with the traditional gradient descent algorithm, the extreme learning machine (ELM) has the advantage of fast computing speed, but the input weights and the hidden node biases that are obtained at random affects the accuracy and generalization performance of ELM. However, the level-based learning swarm optimizer algorithm (LLSO) can quickly and effectively find the global optimal solution of large-scale problems, and can be used to solve the optimal combination of large-scale input weights and hidden biases in ELM. This paper proposes an extreme learning machine with a level-based learning swarm optimizer (LLSO-ELM) for fault diagnosis of industrial robot RV reducer. The model is tested by combining the attitude data of reducer gear under different fault modes. Compared with ELM, the experimental results show that this method has good stability and generalization performance.
Swarm Robot Exploration Strategy for Path Formation Tasks Inspired by Physarum polycephalum
Yandong Luo, Jianwen Guo, Zhenpeng Lao, Shaohui Zhang, Xiaohui Yan
Journal of Complexity, 2021
Summary
Physarum polycephalum, a unicellular and multiheaded slime mould, can form highly efficient networks connecting separated food sources during the process of foraging. These adaptive networks exhibit a unique characteristic in that they are optimized without the control of a central consciousness. Inspired by this phenomenon, we present an efficient exploration and navigation strategy for a swarm of robots, which exploits cooperation and self-organisation to overcome the limited abilities of the individual robots. The task faced by the robots consists in the exploration of an unknown environment in order to find a path between two distant target areas. For the proposed algorithm (EAIPP), we experimentally present robustness tests and obstacle tests conducted to analyse the performance of our algorithm and compare the proposed algorithm with other swarm robot foraging algorithms that also focus on the path formation task. This work has certain significance for the research of swarm robots and Physarum polycephalum. For the research of swarm robotics, our algorithm not only can lead multirobot as a whole to overcome the limitations of very simple individual agents but also can offer better performance in terms of search efficiency and success rate. For the research of Physarum polycephalum, this work is the first one combining swarm robots and Physarum polycephalum. It also reveals the potential of the Physarum polycephalum foraging principle in multirobot systems.
Selected Project
GPU-Accelerated Differential Evolution for Robotic Planning and Control
Propose a general CUDA-accelerated optimization framework for real-time planning and control in robotics. By combining Bézier-parameterized control with SHADE-based differential evolution, the method enables efficient search in hybrid, non-convex, and non-differentiable spaces. It achieves significant speed-ups across cart-pole, bipedal locomotion, and autonomous driving tasks.
Interaction-Aware LSTM-Based Trajectory Prediction Framework for Ego Vehicle Path Forecasting
Predict the future trajectory of an ego vehicle by leveraging its past motion and interactions with nearby vehicles using a self-attention LSTM. With grid-based encoding and masked loss, the model produces accurate, socially-aware predictions in dynamic traffic environments.

Nash Equilibrium-Based Planning for Hierarchical Lane Changing
By modeling lane-changing as a hierarchical game between trajectory and behavior layers, and considering both safety and comfort in the utility function, the system solves for the Nash equilibrium to find the optimal lane-changing strategy.
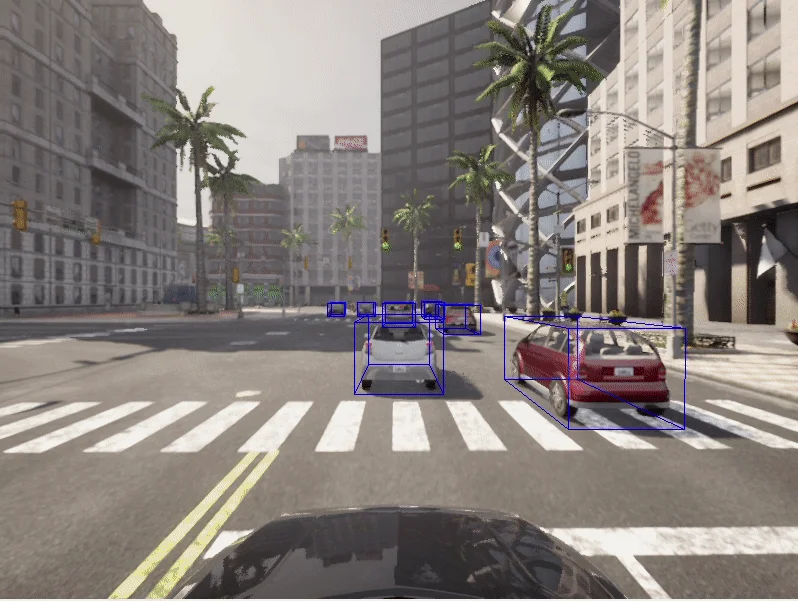
3D Object Detection and Tracking for Autonomous Vehicle
Developed a 3D object detection and tracking pipeline for autonomous vehicles. Integrated 3D IoU-based association, Hungarian matching, and Kalman filtering for robust multi-object tracking.
Path Planning of Reverse Parallel Parking
Implemented a reverse parallel parking planner by projecting 3D perception data into a grid map, generating paths using hybrid A* with steering constraints and Reeds-Shepp heuristics. Applied curvature- and obstacle-aware smoothing for feasible, vehicle-compliant trajectories.
[Github repo] [Night Test] [Vehicle Test][SLAM Test][Simulation Test]
Skill
- Programming Languages: C/C++, CUDA C++, Python, MATLAB
- Frameworks and Tools: PyTorch, ROS, Pybullet, GTSAM, Linux, Docker, Git, Solidwork
- Languages: English, Mandarin, Cantonese